三菱FX5U PLC与三菱ROBOT CC‐LINK IEF BASIC通讯案例详解
王曾
发布于2023-05-11 09:47
73
2
标签:三菱PLC,三菱机器人通讯,PLC与机器人通讯,CC‐LINK通讯
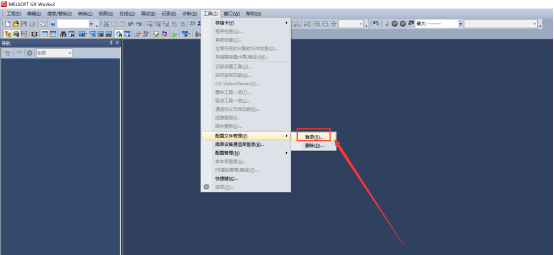
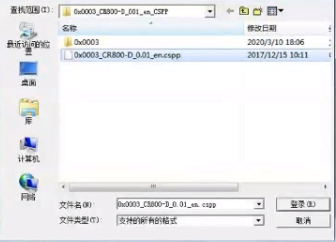
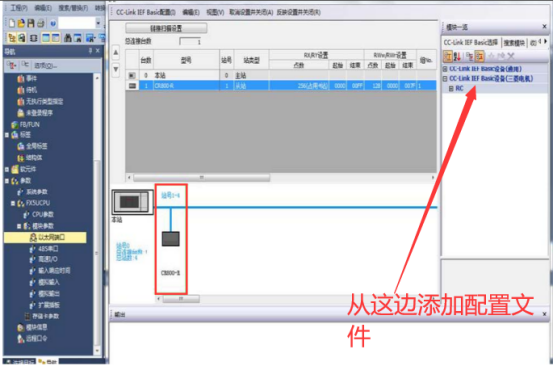
步骤一:新建工程,登录配置文件 (配置文件可以根据机械手型号跟厂家获取,这里以CR-800机器人为例);三菱PLC教程免费试学

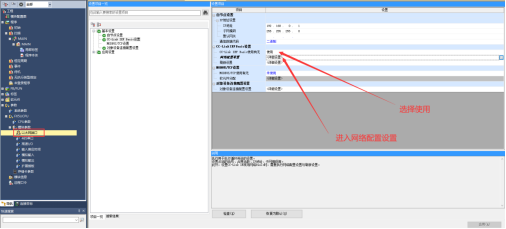
步骤二:CC‐LINK IEF Basic设置;
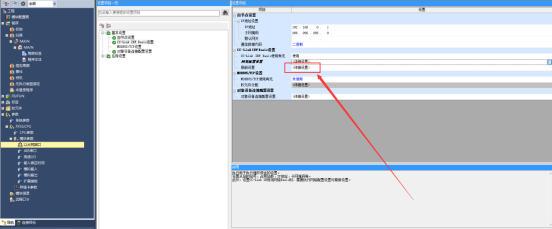
步骤三:远程IO刷新设置;
链接侧为机器人;CPU侧为FX5UCPU;
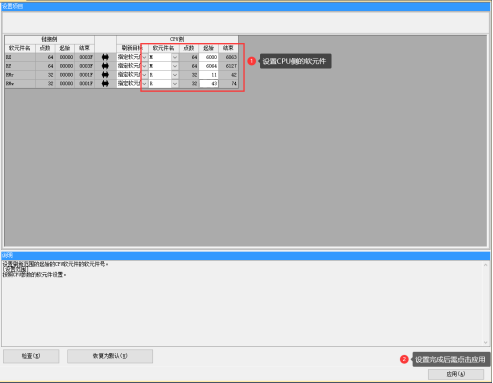
1、位元件RX:机器人的输出作为PLC的远程输人
即PLC M6000-M6063的状态是随着M_out(60O0)-M_out(6063)的状态变化
2﹑位元件RY: PLC的输出作为机器人的远程输人即机器人输入M_in(6000)-M_in(6063)的状态随着PLC M6064-M6167的状态变化
3·字元件RWr:机器人的输出作为PLC的远程输人
即PLC R11-D42的状态是随着M_Dout(60O0)-M_Dout(6063)的状态变化
4﹑位元件RWw: PLC的输出作为机器人的远程输人即机器人输入M_Din(60O0)-M_Din(6063)的状态随着PLC R43-D74的状态变化
CPU侧可以自己设置不同的软元件。注意不要冲突使用
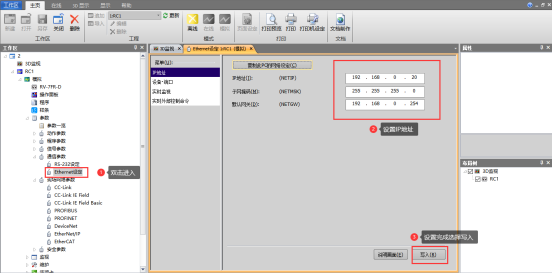
步骤四:ROBOT设置;
打开机器人程序点击在线模式
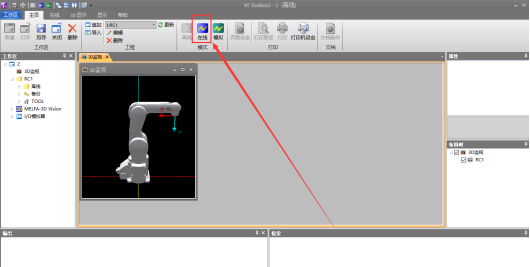
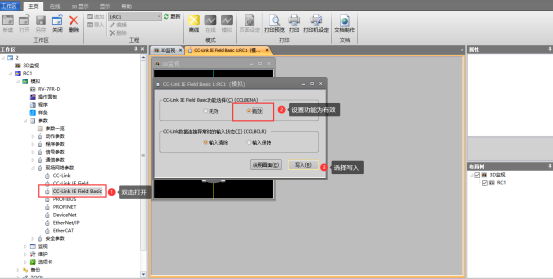
设置CC-LINK IE BASIC功能为有效
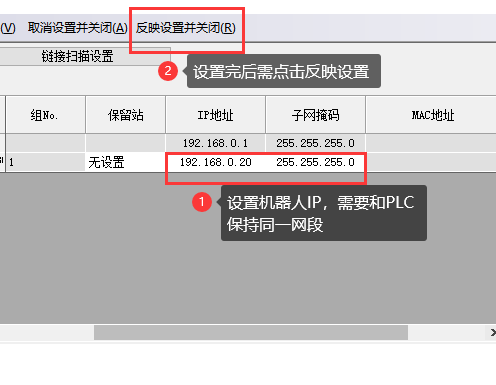
设置机器人IP地址