数字化产线设计及仿真(PROCESS SIMULATE)干货分享:六轴机器人的点焊仿真
饶等
发布于2021-11-30 10:15
34
2
标签:数字化产线设计,六轴机器人,点焊仿真
 【免费下载】PLC软件下载_PLC软件安装教程_PLC手册下载_PLC案例下载!
【免费下载】PLC软件下载_PLC软件安装教程_PLC手册下载_PLC案例下载!
【免费学习】 变频器精品课程_西门子PLC精品教程_三菱PLC精品教程!
一、点焊
点焊,是指焊接时利用柱状电极,在两块搭接工件接触面之间形成焊点的焊接方法。点焊时,先加压使工件紧密接触,随后接通电流,在电阻热的作用下工件接触处熔化,冷却后形成焊点。点焊主要用于厚度4mm 以下的薄板构件冲压件焊接,特别适合汽车车身和车厢、飞机机身的焊接。但不能焊接有密封要求的容器。
点焊是电阻焊的一种,主要用于薄板结构及钢筋等的焊接。
目前汽车车身拼接主要是用点焊工艺,基本都由机器人焊接。
焊点通常是由产品设计人员设计,工艺规划人员进行点焊工艺规划及验证确认。
点焊工艺的规划通常在企业的系统中进行(如:基于eMServer或Teamcenter),可以由基于系统的Process Simualte打包为.psz文件,焊点通常包含在.psz文件中,用Process Simualte独立版打开.psz文件,就可以仿真验证点焊工艺。
在PS独立版本中也可以导入新的焊点,但必须要求焊点的坐标位置信息以指定格式的.csv文件导入。
接下来就给大家介绍六轴机器人的点焊仿真。
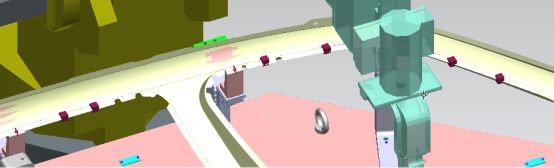
二、点焊仿真
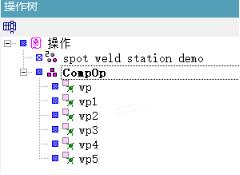
1. 首先创建焊点,点击通过选取创建焊点,如图所示创建焊点。

焊点投影前在操作树中是灰色显示的,如下图:
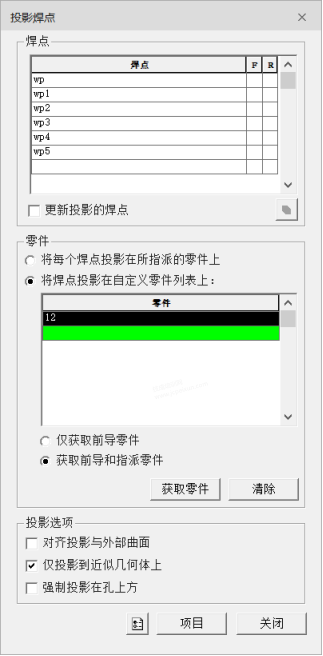
2. 接着我们要给焊接进行投影,定义其焊接的法向及焊接的进入方向。点击投影焊点,在焊点投影对话框中,焊点区域列出所有选择的焊点,零件区域即焊点投影的参考零件选择车架。在投影选择区域,根据需要选择相应的项,点击项目投影焊点。

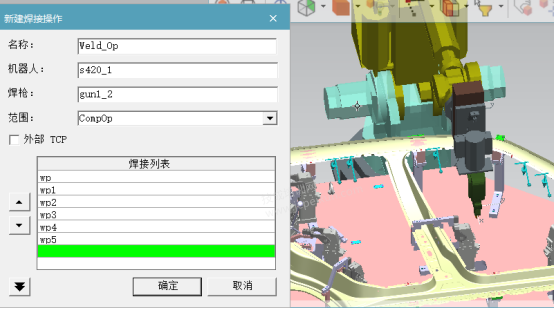
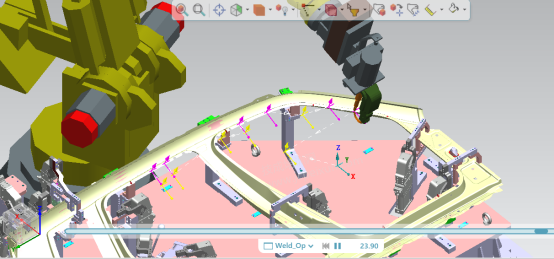
3. 接下来我们创建焊接操作。如图所示新建焊接操作。
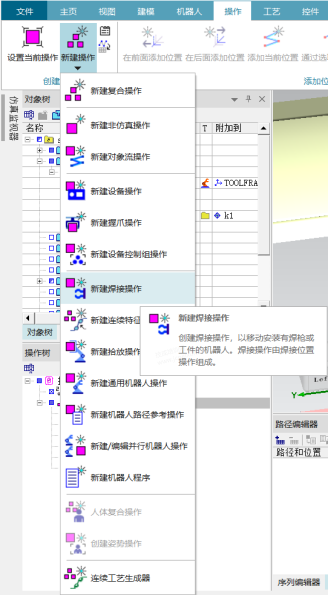
如图所示选择机器人和焊点投影
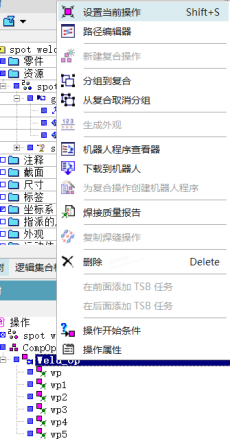
设置当前操作,点击播放,发现不进行仿真。
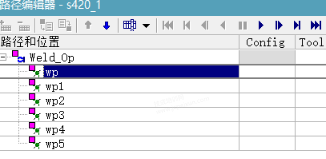
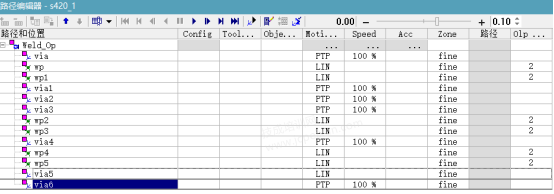
接着我们把该操作添加到路径编辑器里,选中第一个点,点击单个或多个位置操作

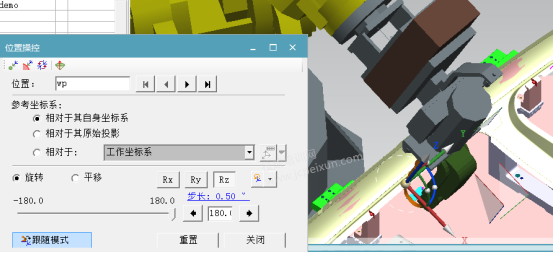
点击跟随模式,接着调节他的方向
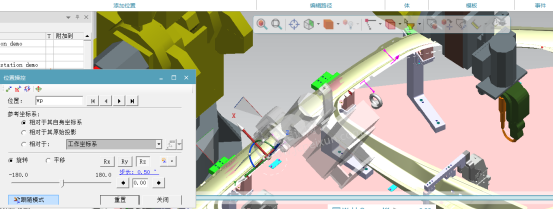
调到180°时发现焊枪跟随过来,说明机器人可以使用焊枪到达这个位置进行点焊,
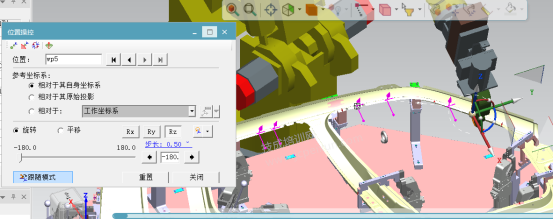
同理其他点也进行同样的调整操作。完成所有焊点的方向优化。
接着点击播放,发现焊枪可以进行点焊操作了,但是我们发现会有干涉碰撞,还需要进行路径优化。
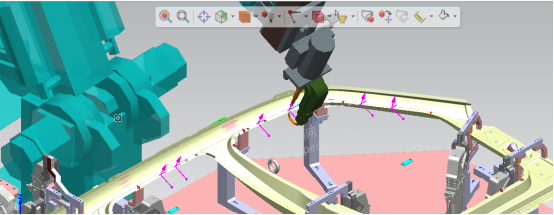
通过在路径编辑器里,对一些焊点的在前面或者后面添加位置来优化它的点焊路径,避免发生碰撞。
完成后点击播放,这样一个简单的机器人点焊操作就完美完成了!
三、焊接选项卡
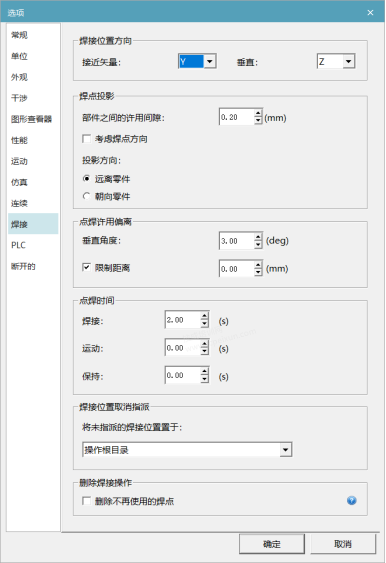
点焊投影选项:
-
指定焊接进入方向和法向对应的坐标
-
焊点在零件上投影的选择
-
焊点偏差
-
点焊时间设定
总结:基于Process Simulate的六轴机器人点焊仿真操作,主要有四个步骤,第一步是创建点焊,第二步是投影焊点,第三步是创建焊接操作,第四步是优化焊点和路径。在完成焊接的操作的过程中,还需要注意的地方就是找到焊接选项卡,设置好指定焊接进入方向和法向对应的坐标、焊点在零件上投影的选择、焊点偏差、点焊时间设定等。
好了,以上就是这次的干货分享了!
(技成培训网原创,作者:姚璇,未经授权不得转载,违者必究)
|

电工精品教程
立即扫码免费学习
|

电工题库宝典
立即扫码免费下载
|

超全PLC学习资料包
立即扫码免费下载
|

故障查询小程序
立即扫码免费使用
|
























