原来机器人指令还可以这样用?又学了一招!
吴翠萍
发布于2020-08-04 09:47
12
2
标签:机器人,指令
机器人搬运的时候经常出现过载的现象,而且搬运的物体比较重的话,使用的指令不适当的话,对机器人使用寿命有很大的影响。下面呢我就给大家分享一下关于这方面是指令哦。
啊?机器人过载了?可能是加速度没设置好哦,那怎么设置机器人的加速度呢,我们以ABB机器人为例给大家介绍。
首先,我们先了解一下什么是加速度呢?
加速度(Acceleration):是速度变化量与发生这一变化所用时间的比值Δv/Δt,是描述物体速度变化快慢的物理量,通常用a表示,单位是m/s2(米每平方秒)

比如这辆车子,从0m/s到10m/s所用的时间是5S那它的加速度是怎么计算的呢?
根据公式a=Δv/Δt
a= 10-0/5-0
=2m/s2
下面,我们就介绍关于加速度指令
应用:
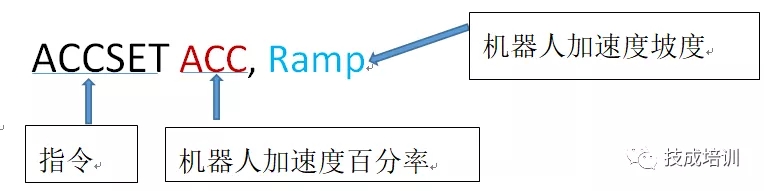
当机器人运行速度改变时,对所产生的相应加速度进行限制,使机器人高速运行时更平缓,但会延长循环时间,系统默认值为 ACCSET 100, 100;
图1

图2
如图1和图2 ,当机器人抓取好物料之后,再次起动的话,机器人可能会报机器人过载,即使不报过载的话,机器人加速度太快,也会对机器人电机损耗太大,这时候就应该使用ACCSET指令改善加速度。那怎么改善呢?我们需要仔细分析这条指令的参数。
示例:
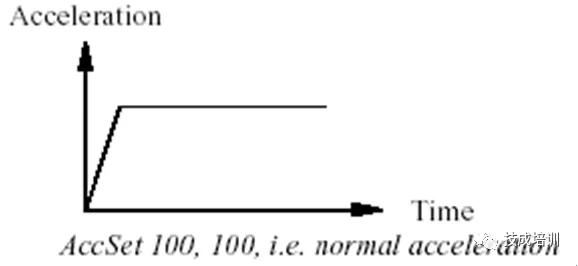
图3
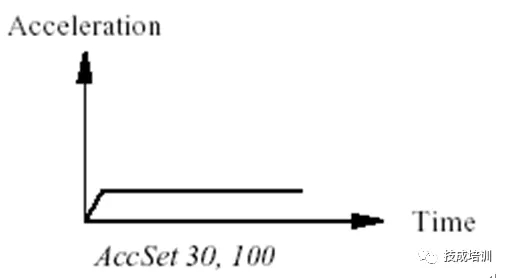
图4
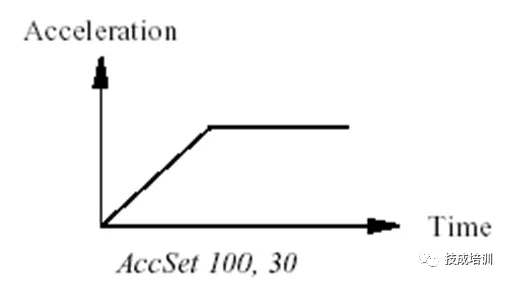
图5
如图3,横轴是time(时间),纵轴是ACC(加速度),假定ACCSET 100,100,加速度时间(time)是3S,ACC(加速度)是3m/s2
由此我们推算如图4:ACCSET 30,100是什么含义?
30:是加速度百分率。100:是加速度坡度。那我们可以看出,坡度和图3是没变的都是100,那加速度百分率是30,那算出加速度是3*30%=0.9m/s2
再推算如图5:ACCSET 100,30, 我们可以看出,加速度百分率是没变的,那加速度的坡度变成了30,加速度的坡度变缓了,那节拍时间就边长了,时间变长了之后,产量就变低了。那时间是多少呢?由图3和图5结合可以推算出:3/0.3=10S,也就是相对图3来说加速度时间是3S,而图5呢是10S了。
注意:
机器人加速度百分率值小为 20,小于 20以 20 计,机器人加速度坡度值小为 10,小于 10 以 10 计机器人冷启动,新程序载入与程序重置后,系统自动设置为默认值。
下面我们来看一段程序代码:
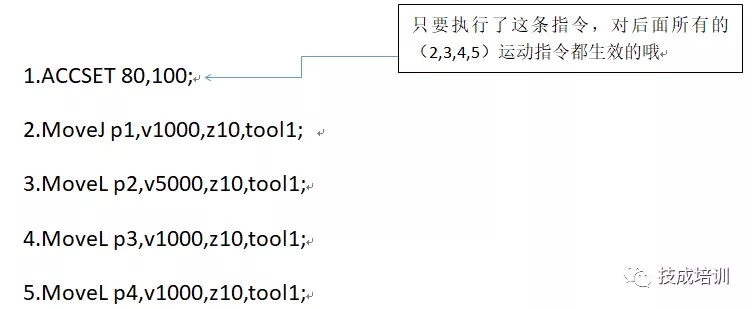
那么,问题来了:假如我们要严格设置机器人的启动加速度和停止时是加速度(在一些特殊场合例如:浇铸 图6)如果加速度设置不好,高温液体会溢出来,那会用到哪个加速度指令呢?留言哦~(技成培训原创,作者:郭彪,未经授权不得转载,违者必究!)
























