
























0/200
提交

技成老师
进行了回答·2022-09-27 11:26:19
双击要调整的对象,进入属性设置,再显示菜单下,激活位置框,这是位置框的尺寸,那么超过尺寸的文字则会自动换行。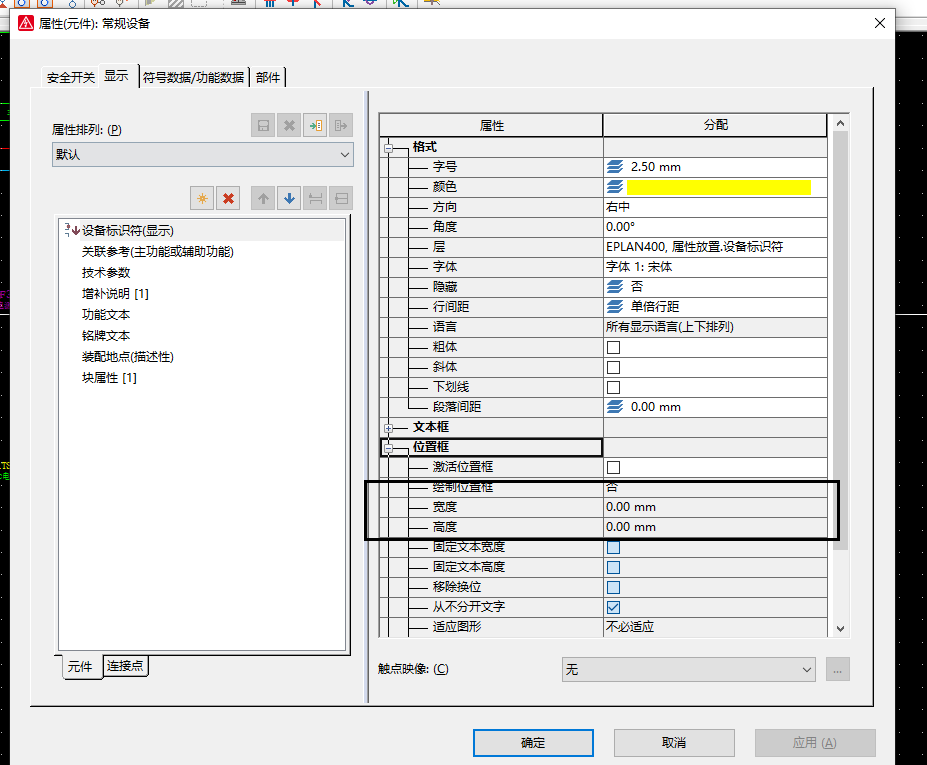 展开
展开
展开
赞
收藏
技成老师
进行了回答·2022-09-27 11:26:19
双击要调整的对象,进入属性设置,再显示菜单下,选择要变更的类,再右侧的角度进行修改即可。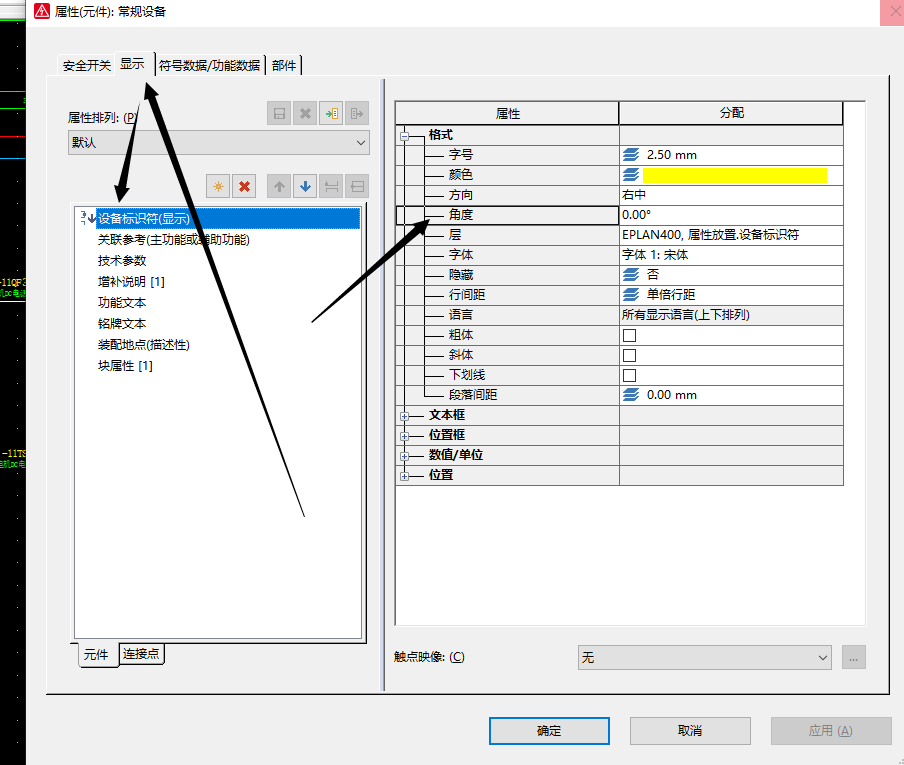 展开
展开
展开
赞
收藏
技成老师
进行了回答·2022-09-27 11:26:19
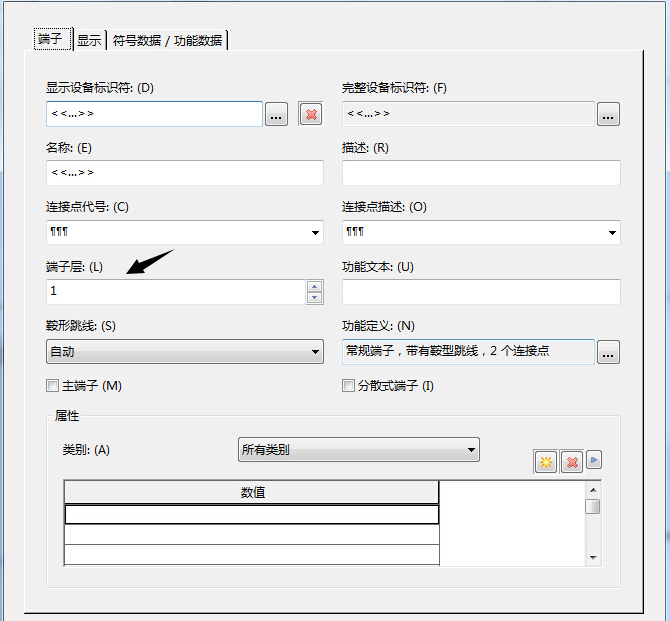
工具--主数据--表格--打开目录模板,项目树模板右击属性,调整下行列数和尺寸优化。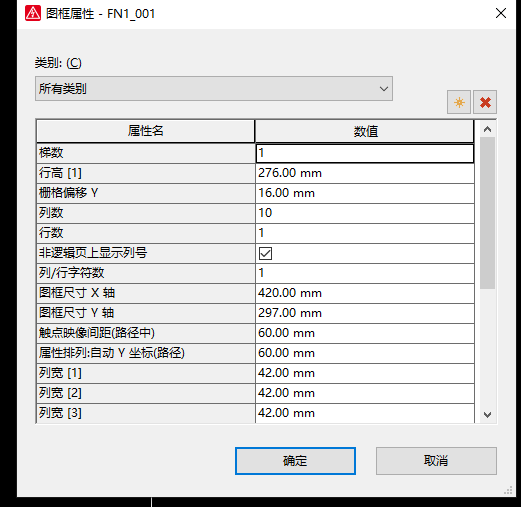 展开
展开
展开
赞
收藏
技成老师
进行了回答·2022-09-27 11:26:19
需要对DI定义,参数为P2.010-P2.017任意选一个DI做原点信号,参数值参考手册表8.1即可。回原点方式在P5.004-P5.006设定。
展开
赞
收藏
技成老师
进行了回答·2022-09-27 11:26:19
1、制动力矩或制动电阻计算(380V 系列)
92% R=780/ 电动机KW
100% R =700/ 电机功率
110% R=650/ 电动机KW
120% R=600/ 电动机KW (大于7.5KW 电机)
R=400/ 电动机KW (小于7.5KW 电机)
注:①电阻值越小,制动力矩越大,流过制动单元的电流越大;
②不 可以使制动单元的工作电流大于其允许最大电流,否则要损坏器件;
③制动时间可人为选择;
④小容量变频器(≤ 7.5KW) 一般是内接制动单元和制动电阻的;
展开剩余62%
⑤当在快速制动出现过电压时,说明电阻值过大来不及放电,应减少电阻值。
2、电阻功率计算方法:
电阻功率= 电机功率* (10%--15% )
一般负荷W(Kw)= 电机功率* 10℅
频繁制动( 1 分钟5 次以上) W(Kw)= 电机功率* 15 ℅
长时间制动(每次4 分钟以上) W(Kw)= 电机功率* 20℅
一般制动电阻器的选择应使制动电流Is 不超过变频器的额定电流Ie,制动电阻最大功率Pmax 要小于1.5 倍的变频器功率,然后与过载系数相乘。过载系数与减速时间和持续制动时间有关,具体要厂家提供电阻器过载系数及参数样本。 展开
92% R=780/ 电动机KW
100% R =700/ 电机功率
110% R=650/ 电动机KW
120% R=600/ 电动机KW (大于7.5KW 电机)
R=400/ 电动机KW (小于7.5KW 电机)
注:①电阻值越小,制动力矩越大,流过制动单元的电流越大;
②不 可以使制动单元的工作电流大于其允许最大电流,否则要损坏器件;
③制动时间可人为选择;
④小容量变频器(≤ 7.5KW) 一般是内接制动单元和制动电阻的;
展开剩余62%
⑤当在快速制动出现过电压时,说明电阻值过大来不及放电,应减少电阻值。
2、电阻功率计算方法:
电阻功率= 电机功率* (10%--15% )
一般负荷W(Kw)= 电机功率* 10℅
频繁制动( 1 分钟5 次以上) W(Kw)= 电机功率* 15 ℅
长时间制动(每次4 分钟以上) W(Kw)= 电机功率* 20℅
一般制动电阻器的选择应使制动电流Is 不超过变频器的额定电流Ie,制动电阻最大功率Pmax 要小于1.5 倍的变频器功率,然后与过载系数相乘。过载系数与减速时间和持续制动时间有关,具体要厂家提供电阻器过载系数及参数样本。 展开
赞
收藏
技成老师
进行了回答·2022-09-27 11:26:19
已知编码器分辨率131072脉冲频率200Khz要使转速达到3000r/min求电子齿轮比。
脉冲接口的最大频率是200KHZ,对应最大转速3000转每分,这样的设定能使定位模块发挥伺服的最高速。
代入以下公式:
马达转速(3000rpm) / 60 = 脉冲频率(200000Hz) * (分子/分母)/ 伺服分辨率(131072)
约分下来电子齿轮分子 4096 ,电子齿轮分母 125
这样的设置结果4000个脉冲转一圈,200Khz的频率对应3000RPM的转速。 展开
脉冲接口的最大频率是200KHZ,对应最大转速3000转每分,这样的设定能使定位模块发挥伺服的最高速。
代入以下公式:
马达转速(3000rpm) / 60 = 脉冲频率(200000Hz) * (分子/分母)/ 伺服分辨率(131072)
约分下来电子齿轮分子 4096 ,电子齿轮分母 125
这样的设置结果4000个脉冲转一圈,200Khz的频率对应3000RPM的转速。 展开
赞
收藏
技成老师
进行了回答·2022-09-27 11:26:19
安装 Startdrive 软件后,会在博途软件中自动安装 Drive_lib 库文件,库中包含非周期通讯功能块“SINA_PARA”( FB286)及“SINA_PARA_S”(FB287),可实现驱动器参数的读/写操作,用户只需要指定参数号、参数下标、以及将要写入的参数值(仅对于写操作),在执行程序块后,相应的读写操作将自动地执行。
展开
赞
收藏
