三菱FX3U分拣案例,机器人大小物件分拣
王曾
发布于2023-02-24 16:56
114
2
标签:三菱分拣案例
一、案例任务控制描述
动作流程:
机械手抓取大中小三中物品;大物品传送到后传送带流出;中物品传送到前传送带,由机械手抓取放到盘中;小物品传送到后传送,检查物品感应器感应到小物品,推出机构将其推出。分拣设备如图1-1,操作面板如图1-2。(详细可以打开FX-TRN-BEG-C软件的F:高级挑战F-7.分拣和分配线。)
控制要求:
(1)当按下操作面板上的[PB1]X20,机器人的供给指令(Y0)被置为ON。当机器人移动完部件而且回到出发点后,供给指令(Y0)被置为OFF。机器人在供给指令(Y0)被置为ON以后补给一个部件。
(2)当操作面板上的[SW1](X24)被置为ON,传送带正转。[SW1](X24)被置为OFF,传送带停止。
(3)在传送带上的大、中和小部件被输入传感器上(X1),(X2)和下(X3)分拣而且将被搬运到特定的碟子上。
(4)当机器人里的部件在桌子上(X11)被置为ON,取出指令(Y7)被置为ON。当机器人操作完成(X12)被置为ON(当一个部件被放到碟子上时为ON),取出指令(Y7)被置为OFF 。
(5)当操作面板上的[SW2](X25)被置为ON以后,当机器人开始搬运一个中部件。当一个小部件被放到碟子上,或者一个大部件从传送带的右端掉下。一个新部件会被自动补给。
(6)闪烁灯在以下情况下点亮。红灯:当机器人补给一个部件时点亮;绿灯:当传送带移动时点亮;黄灯:当传送带停止时点亮。
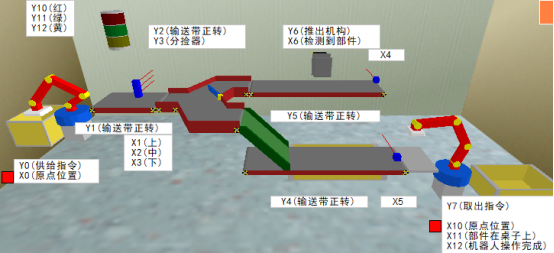
图1-1

图1-2
二、相关基础知识
任务中的案例基于三菱FX系列PLC的应用案例,在学习本案例前请先自评下是否具备以下基础或已完成相关软件安装准备。
Ø 课程一:《三菱重难点解析之基础篇》
(1)GX Works2软件操作
观看地址:https://course.jcpeixun.com/6820/459745.html
(2)上升沿与下降沿
观看地址:https://course.jcpeixun.com/6820/459727.html
(3)学习软件的下载与使用
观看地址:https://course.jcpeixun.com/6820/459896.html
(4)分拣和分拣线
观看地址:https://course.jcpeixun.com/6820/460181.html
(5)输入接线
观看地址:https://course.jcpeixun.com/6820/459875.html
(6)输入接线
观看地址:https://course.jcpeixun.com/6820/459893.html
Ø 相关知识:
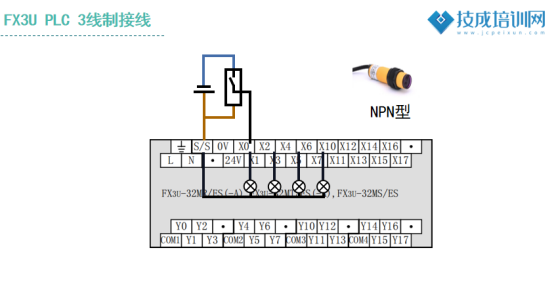
NPN型
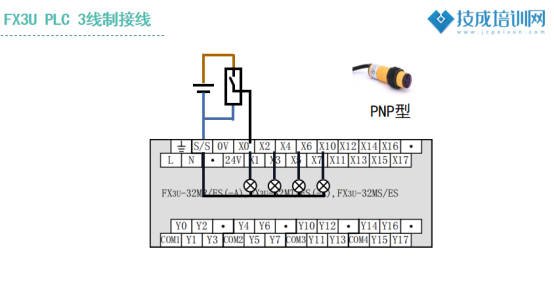
PNP型
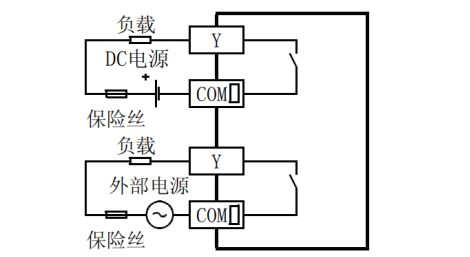
继电器型输出
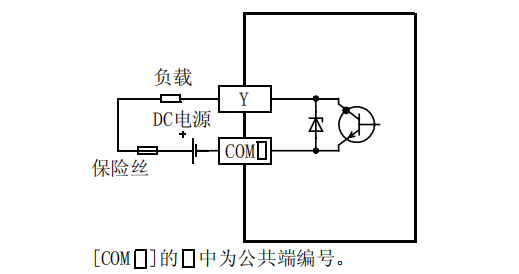
晶体管型输出(漏型)
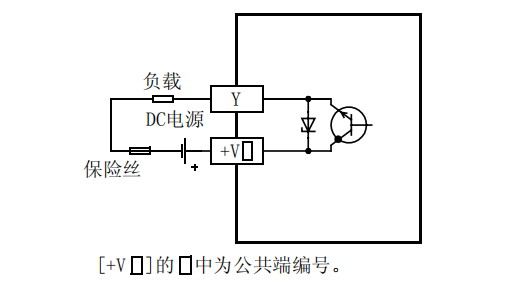
晶体管型输出(源型)
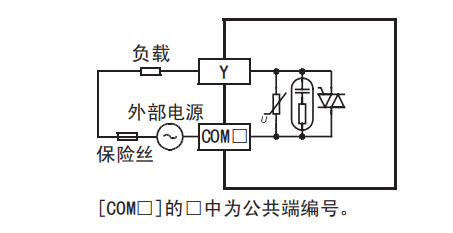
晶闸管型输出
三、任务的实施
1. I/O地址分配
|
输入点
|
注释
|
输出点
|
注释
|
|
X0
|
进料机械手原点位置
|
Y0
|
供给指令
|
|
X1
|
上感应器
|
Y1
|
入料传送带
|
|
X2
|
中感应器
|
Y2
|
分拣传送带
|
|
X3
|
下感应器
|
Y3
|
分拣器
|
|
X4
|
后传送带出料感应器
|
Y4
|
前传送带
|
|
X5
|
前传送带出料感应器
|
Y5
|
后传送带
|
|
X6
|
小物品感应器
|
Y6
|
推出机构
|
|
X10
|
出料机械人原点位置
|
Y7
|
取出指令
|
|
X11
|
桌子感应器
|
Y10
|
红灯
|
|
X12
|
出料机械人完成
|
Y11
|
绿灯
|
|
X20
|
面板PB1
|
Y12
|
黄灯
|
|
X24
|
面板SW1
|
|
|
|
X25
|
面板SW2
|
|
|
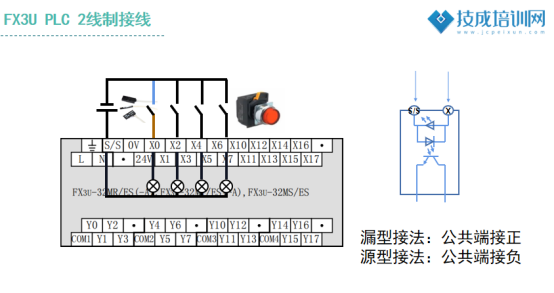
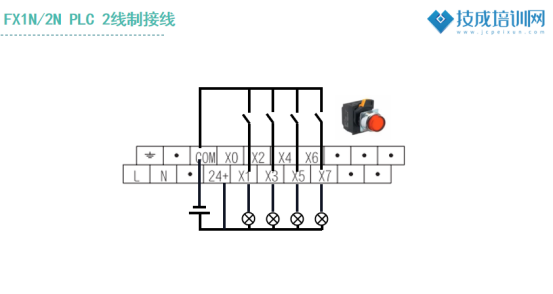
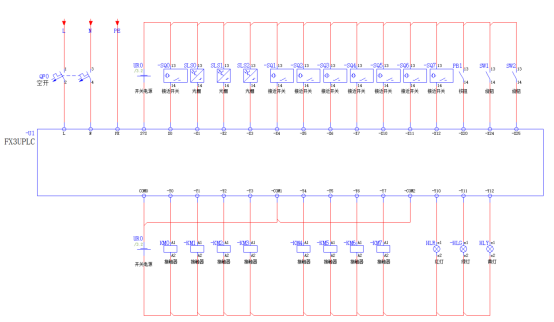
2. 硬件接线图
3. 程序设计
<
























