PLC控制程序设计方法有哪些
林建平
发布于2023-01-05 10:17
44
2
标签:PLC
(1)逻辑代数设计方法
逻辑代数设计方法仿照数字电子技术中的逻辑设计方法进行PLC梯形图程序设计,其基本思路是使用逻辑表达式描述实际问题,从而获得逻辑表达式,根据逻辑表达式设计梯形图。以走廊灯两地控制程序为例,灯的控制输出可表示为:
YO=XO·X1 XO·X1
基于该表达式,很容易编写出梯形图。在实际工程中,单纯的条件控制系统相当于组合逻辑电路,表达式书写简单,对开关量的控制过程可用逻辑代数式表示、分析和设计。由此可见,逻辑代数设计法在各种开关量控制系统中非常实用。逻辑代数设计法的一般步骤如下:
①根据控制要求列出逻辑代数表达式。
②对逻辑代数式进行化简。
③设计1/O编址表,并根据化简后的逻辑表达式设计梯形图程序。
(2)流程图设计法
PLC采用计算机控制技术,其程序设计同样可遵循软件工程设计方法,即PLC控制程序及其运行过程可以流程图来表示。但是,由于PLC基于扫描工作原理,PLC程序的流程图设计法与计算机程序流程图设计法略有不同,从整体上看,PLC程序始终是一个循环结构,即不断地进行输入刷新、程序扫描和输出刷新。流程图设计法的一般步骤如下:
①画出控制系统流程图。
②设计I/O编址表。
③根据流程图,设计梯形图。
(3)顺序功能图设计法
如果系统的动作或工序存在明显的先后关系或顺序关系,一般可采用顺序功能图设计法,简称 SFC设计法。其基本步骤如下:
①根据工作任务设计控制系统的动作顺序图或状态图或节拍表,找出状态发生转换的条件。
②设计I/O编址表。
③将状态流程图翻译成梯形图。
如果有SFC编程环境,可以直接使用SFC进行编程,设计系统的SRC程序,此时不必转换成相应的梯形图控制程序。
(4)Petri网设计法
1962年,德国的C.A.Petri博士提出了Petri网理论,主要用于并发、离散系统的建模。经过多年的发展,该理论已在复杂PLC程序设计中获得了广泛应用。Petri网包括的两种要素称为位置(S元素)和变迁(T元素),它们分别表示系统的状态和变化。每个位置所包含的令牌(Token)数可表示出系统状态,通过Token的流动来演变控制触发的规则。基于Petri网设计PLC控制系统时,Petri网理论主要用来构建控制器的逻辑关系,借助于Petri网导出逻辑表达式、从而设计出PLC控制程序。

下面以自动导向小车运输系统为例,介绍基于Petri网设计PLC控制程序的基本步骤和方法。小车的行走路线如图5-4所示,本系统有2个下料工作站 O1 和 O2,3个上料工作站 I1、I2 和I3。图中圆圈表示的触点用来检测小车在一段路程结束时的状况,小车每到达1个触点,控制系统必须决定是停下等待还是继续行驶为避免撞车,将传送网络划分为若干段,在任意给定时刻,每1段上不能多于1辆小车。在本系统中,假设上料站11向下料站O1供料:上料站12向下料站O2供料;上料站13既可向下料站O1供料,又可向下料站O2供料。由此可见,从3个上料站发出的小车对同一段路的使用具有竞争性,当2辆小车同时请求使用时,就产生了竞争。为了避免小车相撞,必须使用并发型设计思想。即在每个触点处,哪辆小车先到达触点,就将下一段路的使用权交给这辆小车,而只有当这辆小车离开这段路后,这段路的使用权才能交给其他的小车。通过在每辆小车上装备转向控制装置,可控制每辆小车在岔路口的转向。

基于上述思想,构建的自动导向小车运输系统的Petri网如图5-5所示。具有竞争性质的资源,即每一段路备用1个位置元素S来表示,当没有小车在路上行驶时,其S元素内部包含1个Token。图5-5中,1i为第i个上料站上料标志(输入信号);Pji为小车i在j路段上的行驶状况;Sj 为路段j空着的标志;T为小车i离开j路段时的触发标志(输入信号)。图5-5的Petri网模型给出了4种可能的行车顺序:
H1→O1,12→O2,13→O1,13→O2。系统中不同的小车在不同的路段上可以同时运行。通过分析所构造的Petri网,可以写出该自动导向系统的逻辑方程:
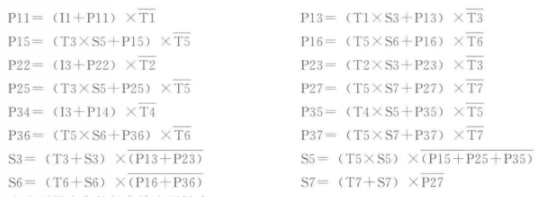
由此可得小车的行车输出逻辑为:
小车1的行车控制输出:OUT11=P11 P13 P15 P16
小车2的行车控制输出:OUT12=P22 P23 P25 P27
小车3的行车控制输出:OUT13=P34 P35 P36 P37
转向输出逻辑为:
小车1转向控制输出:OUT21=P16
小车2转向控制输出:OUT22=P26
小车3转向控制输出:OUT23=P36 P37
针对具体的PLC编写梯形图时,只需使用具体的软元件替换表达式中的各变量即可写出梯形图。例如,可将上料触点信号11~13分配为X0~X2,路段位置触点信号T1~T7分配为X3~X11,行车控制输出OUTl1~OUT13分配为Y0~Y2,转向控制输出OUT11~OUT13分配为Y3~Y5;Si和Pij用M取代。根据上述逻辑关系,即可写出自动导向小车运输系统的梯形图控制程序。
























