NX MCD微案例——握爪工具的使用(一)
饶等
发布于2022-01-11 11:16
62
2
标签:NX MCD,握爪工具,数控,案例学习
 【免费下载】PLC软件下载_PLC软件安装教程_PLC手册下载_PLC案例下载!
【免费下载】PLC软件下载_PLC软件安装教程_PLC手册下载_PLC案例下载!
【免费学习】 变频器精品课程_西门子PLC精品教程_三菱PLC精品教程!
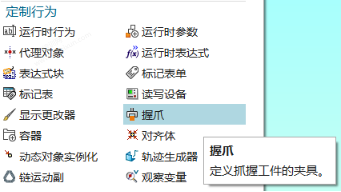
在使用MCD进行机器人搬运仿真时,经常需要自定义机器人的夹具,设置好刚体、碰撞体、滑动副、传感器及位置控制,操作起来比较繁琐。在新版本的NX中新增加了“握爪”工具,使用握爪工具可以方便地定义吸盘或手指握爪从而进行对象抓取操作。
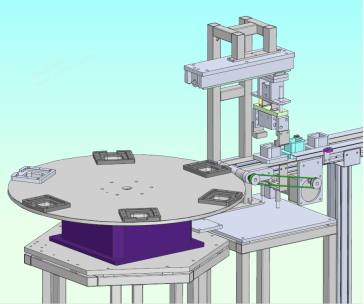
以手指握爪类夹具为例,创建一个二自由度的机械手用于工件搬运。
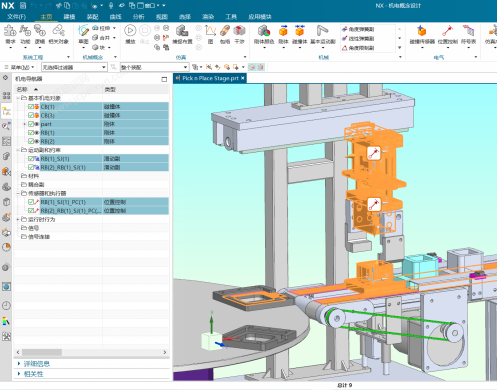
首先需要定义好除了手指握爪外的所有机电对象,注意使用握爪工具来创建夹具不需要定义夹具刚体、碰撞体以及滑动副等对象。
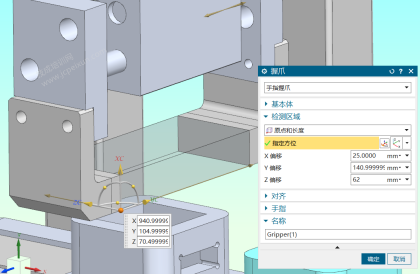
接下来创建一个握爪,基本体选择夹具手指依附的刚体。
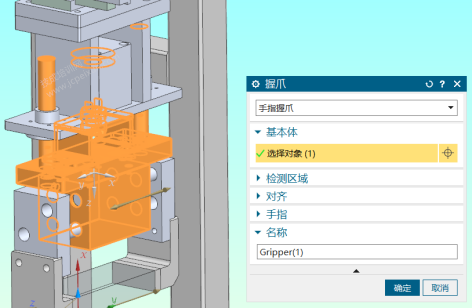
定义检测区域用于检测抓握对象,抓握对象的刚体需要有碰撞体存在,有多种方式可以定义检测区域,这里以“原点和长度”为例。

指定方位选择到手指的一个端点,X、Y、Z偏移可以痛过测量得到,一般只要保证三个偏移值所定义的检测区域能够检测到碰撞体就可以了。
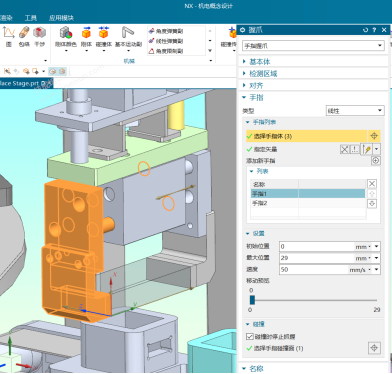
添加握爪的手指,要将单个手指的所有实体都加到手指体当中,并指定手指运动的方向,还可以设定手指运动的初始位置、最大位置和运动速度。此外,勾选“碰撞时停止抓握选项”并选择碰撞面可以使得握爪在发生碰撞时便停止抓握,目前只能定义一个碰撞面。
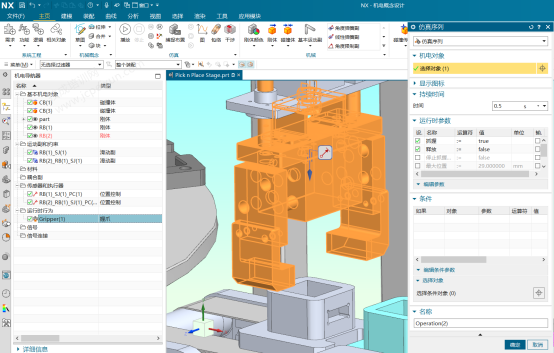
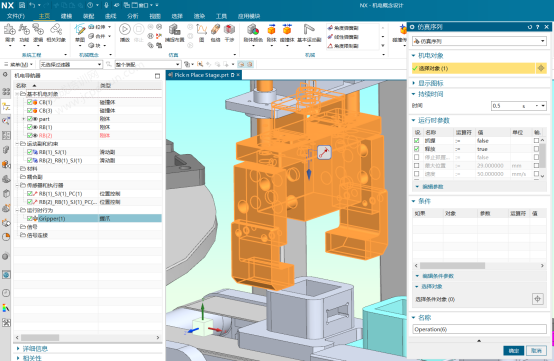
到此完成了握爪的定义,接下来创建仿真序列实现机械手搬运动作,对于握爪的抓取与释放动作需要控制到两个参数。
(技成培训网原创,,未经授权不得转载,违者必究)
|

电工精品教程
立即扫码免费学习
|

电工题库宝典
立即扫码免费下载
|

超全PLC学习资料包
立即扫码免费下载
|

故障查询小程序
立即扫码免费使用
|
























