PLC为上位机的伺服驱动位置控制系统(2)
林慧玲
发布于2015-10-14 11:32
19
0
标签:伺服驱动
PLC为上位机的伺服驱动位置控制系统2
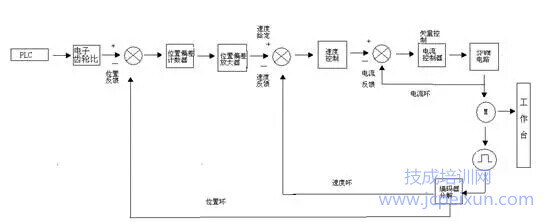
系统工作原理
PLC发出指令脉冲数与编码器检查的位置反馈脉冲数同时送到伺服驱动进行比较运算,并求出偏差值存入位置偏差计数器内,经过位置控制器进行位置增益运算,将运算的结果,即校正信号作为速度控制器的速度给定信号,再与编码器检测出的速度反馈信号进行比较运算,并求出速度偏差值,经过速度控制器,进行Pi速度比例-积分运算,将运算出的结果,作为转矩控制器即电流控制器的电流给定信号,在与电流传感器检测出的电流反馈信号给进行矢量控转换之后,进行比较运算,并求出电流偏差值,经过电流控制器,的矢量变量与功率放大,产生SPWM信号,控制 IGBT伺服逆变主回路,驱动伺服电机带动机床工作台朝着消除偏差的方向运动,由于位置指令是经常变化的随机变量,要求输出量准确跟踪给定定量的变化,因此,输出响应的快速性、灵活性,准确性成为位置随动控制系统的主要性能指标,为满足这些指标的要求,采取由位置环,速度环和电流环三环组成的控制系统
好文章需要分享!~
作者:技成培训网(丁先群)
版权为技成所有未经同意盗取必究!
推荐相关视频课程:
☛伺服驱动器功能参数设置与实操训练
☛三菱FX3U定位控制与伺服应用技术
PLC伺服定位控制
























